大家可能会奇怪,自由停机这么常规的操作还有什么可以分析的吗?电控小白你是不是江郎才尽,没啥可写的了,所以来消遣大家……(哈哈,被大家识破了)
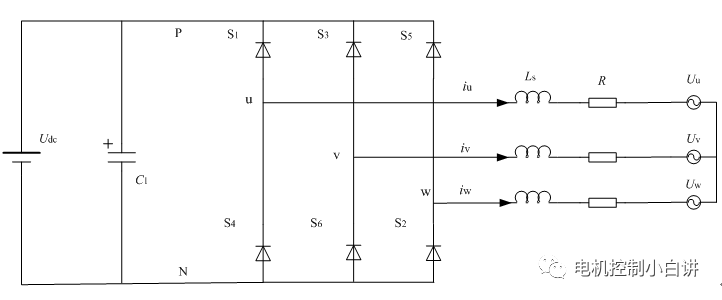
回归正题,我们前面说了FreeWheel是将逆变器的6个开关器件全部关断,这种情况下,IGBT绝对不会导通,分析的时候可以不用考虑IGBT,但是IGBT反并联的二极管存在导通的可能,此时系统的主回路拓扑如下:
这时候逆变器其实等效为三相不控整流电路,当电机转速较低时,电机的反电动势幅值比较小,电机线电压小于母线电压Udc,二极管无法导通,整个回路之间不会产生电流,就不存在能量交互。
随着转速升高,电机反电动势幅值跟随升高,当反电势幅值超过母线电压之后,二极管就会导通,开始进入不控整流,不控整流状态大体可以分为两个阶段:电流断续阶段和电流连续阶段。
电流断续阶段:当反电势幅值超过母线电压不太多时,因为永磁同步电机的反电势是交流电压,所以当反电势瞬时值超过母线电压,二极管就会导通,使电感上的电流增大,当反电势瞬时值小于母线电压时,电感上的电流就会减小,直到电流减小到0后,二极管再次关断,这时候电机三相电流是断续的,随着电机转速的升高,电流断续时间逐渐缩短,同时电流大小逐渐增大,电机输出发电转矩增大,母线电流增大,电机往母线回馈的功率增大(这里的反电势要按线电压来考虑)。

电流连续阶段:随着转速升高到一定之后,电流断续时间缩短到0,此时电机的三相电流将进入连续状态,变为连续的交流电流。

对于电流断续阶段的工作状态,感兴趣的读者可以找周边电力电子技术领域的大佬请教,电控小白就不在这里班门弄斧了,以防被大佬把脸打肿。电控小白这里主要分析一下电流连续阶段下,电机的工作状态。
对于电流断续阶段,随着反电势的升高,电机的发电扭矩会越来越大,对母线回馈的功率也会增大,那么从电流断续进入电流连续状态之后,如果电机转速继续升高,反电势与母线电压之间的压差越来越大,这种情况下,电流会不会越变越大,甚至导致器件过热损坏呢?过大的发电功率会不会导致电池过冲呢?
首先,我们来分析一下,进入电流连续阶段,二极管的工作状态:二极管作为一个单向被动续流器件,在这种工况下,它是导通还是关断完全由电流方向决定。当相电流方向为流入电机时,对应桥臂的下桥臂二极管导通,上桥臂二极管关断(如下图的W相电流所示);当相电流方向为流出电机时,对应桥臂的上桥臂二极管导通,下桥臂二极管关断(如下图中的U相电流所示)。

以U相桥臂为例来分析,u相电流为正时,下桥臂二极管导通,u相电压就被钳位到0(u点对N点的电压);u相电流为负时,上桥臂二极管导通,u相电压被钳位到Udc,故此时u相桥臂上下管各导通180°。v相和w相的工作状态与u相一致,此时逆变器其实工作在180°导通工作模式。

从图中可以明显看出,作用到电机端U相上的电压为与电流反向的方波电压,结合分析UVW三相的电压,可以发现此时作用到电机端的电压其实就是六个基本电压矢量,等效为过调制的最终形式-六阶梯波,同时电压矢量与电流矢量反向(相位相差180°)。

通过前面分析,进入电流连续阶段后,作用到电机端的电压为六阶梯波,基波电压幅值固定,我们定义这时的电压幅值为Us,具体数值电控小白就不在这里分析了,感兴趣的读者可以自行分析。
虽然通过解方程组获得了两个角度正弦值的根,但是这里面只要一个根是真实可取的:假定取“+”,当单机转速足够高,会导致计算出来的正弦值大于1,但是正弦值不可能超过1,所以两者相悖,因此只能取“-”。

从角度正弦值的解析表达式可看出:当母线电压固定时,随着转速(以正转为例分析)的升高,正弦值逐渐减小,电压矢量与D轴夹角减小;当转速趋近于无穷大时,正弦值趋近于0,电压矢量与D轴夹角趋近于0。


因为这里的解析表达式比较繁琐,电控小白就不对其进行更加深入的分析了,感兴趣的读者可以自行将Is的表达式带入,对其求偏微分分析转矩随转速的变化情况。这里请容电控小白偷懒,我直接将解析表达式输入matlab脚本中,利用matlab直接输出相关的曲线。


电流矢量幅值随着转速的升高而逐渐增大,但随着转速升高,电流曲线的斜率逐渐减小,电流增长速度变慢,当转速超过一定值后,电流幅值变化不明显,可以近似认为保持不变。转速升高到无穷大时,电流矢量幅值约为电机特征电流,电控小白就不在这里对这个结论进行证明了,感兴趣的读者可以自行分析。

电机输出转矩绝对值随着转速的升高,先增大后减小,最大转矩出现在距离进入电流连续阶段的转速点附近。
虽然前面从理论上分析了永磁同步电机在自由停机状态下的工作状态,但是前面的分析是否正确呢?电控小白再次利用模型来验证。

上图为电机的相电流波形,可以看出当转速升高使反电势超过母线电压后,相电流幅值随着转速的升高快速增大,但电流变化率逐渐减小;当转速超过一定值后,电流幅值增大不在明显,与前面的分析一致。

理论曲线的最大转矩比仿真曲线略大,主要是因为理论分析是忽略了定子电阻的影响,电阻本身会消耗能量,导致转矩减小;同样的,因为忽略定子电阻的影响,所以最大转矩对应的转速会有一定的偏差。
1、当电机转速较低,反电势幅值小于母线电压时,由于二极管的单相导通特性,电机上不会产生电流,电机与母线之间没有能量交换;
2、当电机转速升高到使反电势幅值超过母线电压,但超过较小时,二极管会导通,电机上会产生电流,但电流不连续,为电流断续阶段,在这个阶段内,随转速升高,电流幅值快速增大,电机输出发电转矩快速增大;
3、当电机转速升高到足够高,电机反电势使电机电流持续存在,电机将进入电流连续阶段,此时作用到电机端的电压矢量恒定,电压矢量相位与电流相位相反;
5、在整个过程中,电机的电流矢量幅值随转速升高持续增大,但随着转速升高,电流幅值变化率逐渐减小,超过一定转速后,可以近似认为不变,当转速趋于无穷大时,电流幅值约为电机的特征电流。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

模糊自整定自适应积分反步控制方法。将dq轴电流误差积分项引入自适应反步控制律中,构成自适应电流误差积分反步,实现对dq轴电流给定的精确跟踪,提高dq轴电流控制系统对内部参数摄动的鲁棒性。在此基础上,设计模糊推理模块,应
无位置控制算法,全部C语言 编写,含有矢量控制大部分功能(弱磁,解耦,过调制,死区补偿等)为了方便学习和工作,该产品结合S-Function进行仿真,且属于量产产品
无位置控制算法,全部C语言 编写,含有矢量控制大部分功能(弱磁,解耦,过调制,死区补偿等),为了方便学习和工作,该产品结合S-Function进行仿线
(Permanent Magnet Synchronous Motor, PMSM)按照转子结构的不同可分为:表贴式
(PMSM)优越的性能,其越来越受到国内外专家学者的重视,并广泛应用到了工业领域的各个方面。由于PMSM采用的是三相交流供电,其数学模型比普通的直流电动机复杂的多,...
控制仿真系列文章已经发布两篇,每篇文章都开源simulink仿真模型。在此抄录前两篇文章地址,供有需要的朋友查阅。Simulink
,无转速误差等优点,非常适用于变频调速。但是,由于其固有的工作原理,在弱磁调速的范围,会出现
(PMSM: permanent magnet synchronous motor),PMSM根据
的机器是最先进的,因为它在各种运行速度下不使用任何齿轮系统。使用configuration
品类。它的日渐成功,主要得益于结构简单带来的电控调速的便宜性和显著占优的功率密度。 工作原理
PMSM,英文全称为Permanent-magnet Synchronous Motor,直译为
将电能转换成机械能的电动机。它的转速与电源频率无关,主要依靠励磁磁场与旋转磁场的交互作用来实现转矩输出。
。